時間序列數據伴隨着我們的生活和工作。從牙牙學語時的“1, 2, 3, 4, 5, ……”到房價的走勢變化,從金融領域的刷卡記錄到運維領域的核心網性能指標。時間序列中的規律能加深我們對事物和場景的認識,時間序列中的異常能提醒我們某些部分可能出現問題。那麼如何去發現時間序列中的規律、找出其中的異常點呢?接下來,我們將揭開這些問題的面紗。
什麼是異常
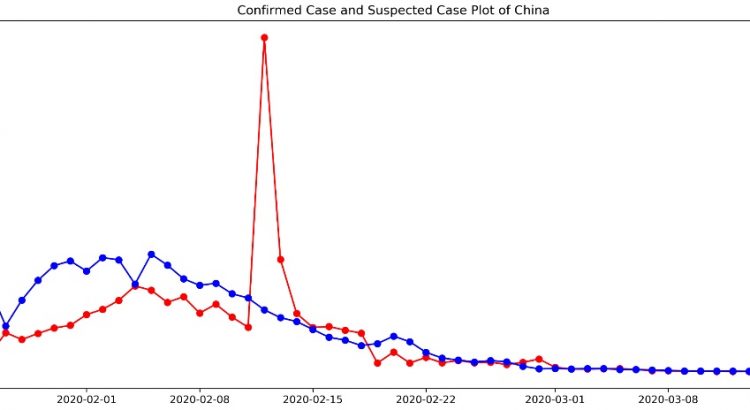
直觀上講,異常就是現實與心理預期產生較大差距的特殊情形。如2020年春節的新型肺炎(COVID-19,coronavirus disease 2019),可以看到2月12日有一個明顯的確診病例的升高,這就是一個異常點,如下圖:
從統計上講,嚴重偏離預期的點,常見的可以通過3-sigma準則來判定。
從數學上講,它就是一個分段函數:
那麼我們有哪些方法來發現異常呢?異常分析的方法有很多,在本文中,我們主要講解時間序列分解的算法。接下來,我們先從時間序列的定義開始講起。
什麼是時間序列
前面章節,我們列舉了生活和工作中的一些時間序列的例子,但是並沒有給出定義。在本節中,我們將首先給出時間序列的定義,然後給出時間序列的分類方法,最後再給大家展示常見的時間序列。
1.時間序列的定義
時間序列是不同時間點的一系列變量所組成的有序序列。例如北京市2013年4月每日的平均氣溫就構成了一個時間序列,為了方便,我們一般認為序列中相鄰元素具有相同的時間間隔。
時間序列可以分為確定的和隨機的。例如,一個1990年出生的人,從1990年到1999年年齡可以表述為{0,1,2,…,9},這個序列並沒有任何隨機因素。這是一個確定性的時間序列。現實生活中我們所面對的序列更多的是摻雜了隨機因素的時間序列,例如氣溫、銷售量等等,這些是帶有隨機性的例子。我們說的時間序列一般是指帶有隨機性的。
那麼對於隨機性的時間序列,又如何進行分類呢?
2.時間序列的分類
從研究對象上分,時間序列分為一元時間序列和多元時間序列,如新冠肺炎例子中,只看確診病例的變化,它是一元時間序列。如果把確診病例和疑似病例聯合起來看,它是一個多元時間序列。
從時間參數上分,時間序列分為離散時間的時間序列和連續時間的時間序列。例如氣溫變化曲線,通常是按照天、小時進行預測、計算的,這個採集的時間是離散的,因此,它是一個離散時間的時間序列。再如花粉在水中呈現不規則的運動,它無時無刻不在運動,它是一個連續時間的時間序列,這就是大家眾所周知的布朗運動。在我們的工作中,我們一般遇到的都是離散時間的時間序列。
從統計特徵上分,時間序列分為平穩時間序列和非平穩時間序列。平穩序列從直觀上講,均值和標準差不隨着時間發生變化,而非平穩序列均值或者標準差一般會隨着時間發生變化。下面兩個圖分別給出平穩序列和非平穩序列的例子。
3.常見的時間序列
在本節,我們將給大家列舉一些常見的時間序列,讓大家對常見的時間序列有一個直觀的概念。
時間序列的分解
前面給大家講了異常和時間序列的概念,本章將給大家講解時間序列分解技術。
1.目的
時間序列分解是探索時序變化規律的一種方法,主要探索周期性和趨勢性。基於時序分解的結果,我們可以進行後續的時間預測和異常檢測。
2.主要組成部分
在時間序列分析中,我們經常要關注趨勢和周期。因此,一般地,我們將時序分成三個部分:趨勢部分、周期部分和殘差部分。結合下圖CO2含量的例子(見下圖)對這三個主要部分進行解釋:
1)趨勢部分:展示了CO2含量逐年增加;
2)周期部分:反應了一年中CO2含量是周期波動的;
3)殘差部分:趨勢和周期部分不能解釋的部分。
3.時序分解模型
時間序列分解基於分解模型的假設。通常,我們會考慮以下兩種模型:
加法模型適用於以下場景:
- 當周期性不隨着趨勢發生變化時,首選加法模型,如下圖(a);
- 當目標存在負值時,應選擇加法模型;
乘法模型適用於以下場景:
- 周期隨着隨時發生變化時,首選乘法模型,如下圖(b);
- 經濟數據,首選乘法模型(增長率、可解釋)。
另外,當我們不清楚選擇哪個模型時,可以兩個模型都使用,選擇誤差最小的那一個。
由於乘法模型與加法模型可以相互轉化,我們後面僅以加法模型來進行介紹。
4.時序分解算法
基於周期、趨勢分解的時序分解算法主要有經典時序分解算法、Holt-Winters算法和STL算法。經典時序分解算法起源於20世紀20年代,方法較簡單。Holt-Winters算法於1960年由Holt的學生 Peter Winters 提出,能夠適應隨着時間變化的季節項。STL(Seasonal and Trend decomposition using Loess)分解法,由Cleveland 等於1990年提出,比較通用,且較為穩健。三者之間的關係,如下圖所示:
4.1經典時序分解算法
經典時序分解算法是最簡單的一種分解算法,它是很多其他分解算法的基礎。該算法基於“季節部分不隨着時間發生變化”這一假設,且需要知道序列的周期。另外,該算法基於滑動平均技術。
其中,m=2k+1. 也就是說,時刻t的趨勢項的估計值可以通過前後k個時刻內的平均值得到。階數 m 越大,趨勢越光滑。由上面的公式可以看出,m一般取奇數,這保證了對稱性。但是在很多場景下,周期是偶數,例如一年有4個季度,則周期為4,是偶數。此時,需要做先做一個4階滑動平均(4-MA),再對所得結果做一個2階滑動平均(2-MA),整個過程記為 。這樣處理后的結果是對稱的,即加權的滑動平均,數學表達如下:
下面我們將講解經典時序分解算法的計算步驟。
經典時序分解算法雖然簡單、應用廣泛,但是也存在一些問題:
1) 無法估計序列最前面幾個和最後面幾個的趨勢和周期部分,例如若m=4,則無法估計前2個和后2個觀測的趨勢和周期的部分;
2) 嚴重依賴“季節性部分每個周期都是相同的”這一假設;
3) 過度光滑趨勢部分。
4.2Holt-Winters算法
在上一節中,我們介紹了經典時序分解算法,但是它嚴重依賴“季節性部分每個周期都是相同的”這一假設。為了能夠適應季節部分隨時間發生變化,Holt-Winters算法被提出。Holt-Winters算法是基於簡單指數光滑技術。首先,我們先介紹簡單指數光滑技術。
簡單指數光滑的思想主要是以下兩點:
- 對未來的預測:用當前的水平對下一時刻的點進行預測;
- 當前水平的估計:使用當前時刻的觀測值和預測值(基於歷史觀測數據的預測值,即上一時刻的水平)的加權平均作為當前水平的估計。
簡單指數光滑的模型比較簡單,如下:
Holt-Winters算法是簡單指數光滑在趨勢(可理解為水平的變化率)和季節性上的推廣,主要包括水平(前文中的趨勢項)、趨勢項和季節項三個部分。
4.3 STL算法
STL(Seasonal and Trend decomposition using Loess)是一個非常通用的、穩健性強的時序分解方法,其中Loess是一種估算非線性關係的方法。STL分解法由 Cleveland et al. (1990) 提出。
STL算法中最主要的是局部光滑技術 (locally weighted scatterplot smoothing, LOWESS or LOESS),有時也稱為局部多項式回歸擬合。它是對兩維散點圖進行平滑的常用方法,它結合了傳統線性回歸的簡潔性和非線性回歸的靈活性。當要估計某個響應變量值時,先從其預測點附近取一個數據子集(如下圖實點 是要預測的點,選取周圍的需點來進行擬合),然後對該子集進行線性回歸或二次回歸,回歸時採用加權最小二乘法(如下圖,採用的是高斯核進行加權),即越靠近估計點的值其權重越大,最後利用得到的局部回歸模型來估計響應變量的值。用這種方法進行逐點運算得到整條擬合曲線。
STL算法的主要環節包含內循環、外循環和季節項后平滑三個部分:
- 內循環:
- 外循環:
外循環主要作用則是引入了一個穩健性權重項,以控制數據中異常值產生的影響,這一項將會考慮到下一階段內循環的臨近權重中去。
- 季節項后平滑:
趨勢分量和季節分量都是在內循環中得到的。循環完后,季節項將出現一定程度的毛刺現象,因為在內循環中平滑時是在每一個截口中進行的,因此,在按照時間序列重排后,就無法保證相鄰時段的平滑了,為此,還需要進行季節項的后平滑,后平滑基於局部二次擬合,並且不再需要在loess中進行穩健性迭代。
異常判斷的準則
對於異常的判斷,我們常用的有 n-sigma 準則和boxplot準則(箱線圖準則)。那這些準備是如何計算的,有哪些區別和聯繫呢?
1.n-sigma 準則
n-sigma準則有計算簡單、效率高且有很強的理論支撐,但是需要近似正態的假設,且均值和標準差的計算用到了全部的數據,因此,受異常點的影響較大。
2.boxplot 準則
為了降低異常點的影響,boxplot準則被提出。boxplot(箱線圖)是一種用作显示一組數據分散情況的統計圖,經常用於異常檢測。BoxPlot的核心在於計算一組數據的中位數、兩個四分位數、上限和下限,基於這些統計值畫出箱線圖。
根據上面的統計值就可以畫出下面的圖,超過上限的點或這個低於下限的點都可以認為是異常點。
從上面的計算上可以看出,boxplot對異常點是穩健的。
基於時序分解的異常檢測算法
在前面的章節,我們了解了時序分解的算法,也學習了異常判斷的準則,那麼如何基於時序分解進行異常檢測呢?在本章,我們將首先給出異常檢測算法的原理,再給出基於時序分解的異常檢測算法步驟。
1.異常檢測算法原理
回顧一下異常的定義,它是一個分段函數:
我們可以看到預測值(擬合值)和閾值是不知道的。對於預測值,我們可以通過找規律來猜這個預測值是多少,本章我們可以通過時序分解找周期和趨勢的規律,進而得到預測值。對於閾值,我們可以看到閾值是針對真實值和預測值的差值設置的,目的是把異常值找到,因此我們只要找到正常值的殘差和異常值的殘差的邊界即可。而我們n-sigma準則和boxplot準則就可以根據殘差把邊界找出來,即閾值。這個思考和實現的過程示意圖如下:
2.基於時序分解的異常檢測算法
Demo代碼下載地址 ,本文主要是想記錄基於時間序列的異常檢測方法,希望能夠幫到你。
點擊關注,第一時間了解華為雲新鮮技術~
本站聲明:網站內容來源於博客園,如有侵權,請聯繫我們,我們將及時處理
【其他文章推薦】
※USB CONNECTOR掌控什麼技術要點? 帶您認識其相關發展及效能
※台北網頁設計公司這麼多該如何選擇?
※智慧手機時代的來臨,RWD網頁設計為架站首選
※評比南投搬家公司費用收費行情懶人包大公開
※回頭車貨運收費標準