目標
這個階段會給cute-dl添加循環層,使之能夠支持RNN–循環神經網絡. 具體目標包括:
- 添加激活函數sigmoid, tanh.
- 添加GRU(Gate Recurrent Unit)實現.
- 添加LSTM(Long Short-term Memory)實現.
- 使用基於GRU和LSTM的RNN模型擬合一個正餘弦疊加函數.
RNN原理
原始的RNN
RNN模型用來捕捉序列數據的特徵. 給定一個長度為T的輸入系列\(X=(x_1, x_2, .., X_T)\), RNN層輸出一個長度為T的序列\(H=(h_1, h_2, …, H_T)\), 對於任意時間步t, 可以表示為:
\[H_t = δ(X_tW_x + H_{t-1}W_h + b), \quad t = 2, 3, .., T \]
函數δ是sigmoid函數:
\[δ = \frac{1}{1 + e^{-x}} \]
\(H_t\)包含了前面第1到t-1步的所有信息。 和CNN層類似, CNN層在空間上共享參數, RNN層在時間步上共享參數\(W_x, W_h, b\).
RNN層中隱藏層的數量為T-2, 如果T較大(超過10), 反向傳播是很容易出現梯度爆炸. GRU和LSTM就是為了解決這個問題而誕生, 這兩種模型,可以讓RNN能夠支持長度超過1000的輸入序列。
GRU
GRU使用了不同功能的門控單元, 分別捕捉序列上不同時間跨度的的依賴關係。每個門控單元都會都有獨立的參數, 這些參數在時間步上共享。
GRU的門控單元有:
\(R_t = δ(X_tW^r_x + H_{t-1}W^r_h + b^r)\), 重置門用於捕捉短期依賴關係.
\(U_t = δ(X_tW^u_x + H_{t-1}W^u_h + b^u)\), 更新門用於捕捉長期依賴關係
\(\bar{H}_t = tanh(X_t\bar{W}_x + (R_t * H_{t-1})\bar{W}_h + \bar{b})\)
除此之外, 還有一個輸出單元:
\(H_t = U_t * H_{t-1} + (1-U_t)*\bar{H}_t\)
LSTM
LSTM的設計思路和GRU類似, 同樣使用了多個門控單元:
\(I_t = δ(X_tW^i_x + H_{t-1}W^i_h + b^i)\), 輸入門,過濾記憶門的輸出.
\(F_t = δ(X_tW^f_x + H_{t-1}W^f_h + b^f)\), 遺忘門, 過濾前面時間步的記憶.
\(O_t = δ(X_tW^o_x + H_{t-1}W^o_h + b^o)\), 輸出門, 過濾當前時間步的記憶.
\(M_t = tanh(X_tW^m_x + H_{t-1}W^m_h + b^m)\), 記憶門.
它還有自己獨有的記憶單元和輸出單元:
\(\bar{M}_t = F_t * \bar{M}_{t-1} + I_t * M_t\)
\(H_t = O_t * tanh(\bar{M}_t)\)
RNN實現
設計要求:
- RNN層中的隱藏層的數量是基於序列長度的,輸入序列有多長, RNN層應生成對應數量的隱藏層。
- RNN層在時間步上共享參數, 從前面的描述可以看出, 只有門控單元有參數,因此門控單元應獨立實現。
- 任意一個時間步上的層都依賴上一個時間步的輸出,在正向傳播和反向傳播過程中都需要上一個時間步的輸出, 每個門控單元都使用棧保存上一個時間步的輸出.
- 默認情況下RNN層輸出所有時間步的輸出。但有時只需要最後一個時間步的輸出, 這種情況下使用過濾層, 只向下一層傳播最後一個時間步的輸出。
- 使用門控單元實現GRU和LSTM
RNN基礎類的實現
RNN類
文件: cutedl/rnn_layers.py, 類名: RNN
這個類是RNN層基類, 它主要功能是控制向前傳播和向後傳播的主流程.
初始化參數:
'''
out_units 輸出單元數
in_units 輸入單元數
stateful 保留當前批次的最後一個時間步的狀態作為下一個批次的輸入狀態, 默認False不保留
RNN 的輸入形狀是(m, t, in_units)
m: batch_size
t: 輸入系列的長度
in_units: 輸入單元數頁是輸入向量的維數
輸出形狀是(m, t, out_units)
'''
def __init__(self, out_units, in_units=None, stateful=False, activation='linear'):
向前傳播
def forward(self, in_batch, training):
m, T, n = in_batch.shape
out_units = self.__out_units
#所有時間步的輸出
hstatus = np.zeros((m, T, out_units))
#上一步的輸出
pre_hs = self.__pre_hs
if pre_hs is None:
pre_hs = np.zeros((m, out_units))
#隱藏層循環過程, 沿時間步執行
for t in range(T):
hstatus[:, t, :] = self.hiden_forward(in_batch[:,t,:], pre_hs, training)
pre_hs = hstatus[:, t, :]
self.__pre_hs = pre_hs
#pdb.set_trace()
if not self.stateful:
self.__pre_hs = None
return hstatus
反向傳播
def backward(self, gradient):
m, T, n = gradient.shape
in_units = self.__in_units
grad_x = np.zeros((m, T, in_units))
#pdb.set_trace()
#從最後一個梯度開始反向執行.
for t in range(T-1, -1, -1):
grad_x[:,t,:], grad_hs = self.hiden_backward(gradient[:,t,:])
#pdb.set_trace()
if t - 1 >= 0:
gradient[:,t-1,:] = gradient[:,t-1,:] + grad_hs
#pdb.set_trace()
return grad_x
sigmoid和tanh激活函數
sigmoid及其導數
\[sigmoid = \frac{1}{1+e^{-x}} \]
\[\frac{d}{dx}sigmoid = sigmoid(1-sigmoid) \]
tanh及其導數
\[tanh = \frac{e^x – e^{-x}}{e^x + e^{-x}} \]
\[\frac{d}{dx}tanh = 1 – tanh^2 \]
門控單元實現
文件: cutedl/rnn_layers.py, 類名: GateUint
門控單元是RNN層基礎的參數單元. 和Dense層類似,它是Layer的子類,負責學習和使用參數。但在學習和使用參數的方式上有很大的不同:
- Dense有兩個參數矩陣, GateUnit有3個參數矩陣.
- Dense在一次反向傳播過程中只使用當前的梯度學習參數,而GateUnit會累積每個時間步的梯度。
下面我們會主要看一下GateUnit特別之處的代碼.
在__ init__方法中定義參數和棧:
#3個參數
self.__W = None #當前時間步in_batch權重參數
self.__Wh = None #上一步輸出的權重參數
self.__b = None #偏置量參數
#輸入棧
self.__hs = [] #上一步輸出
self.__in_batchs = [] #當前時間步的in_batch
正向傳播:
def forward(self, in_batch, hs, training):
W = self.__W.value
b = self.__b.value
Wh = self.__Wh.value
out = in_batch @ W + hs @ Wh + b
if training:
#向前傳播訓練時把上一個時間步的輸出和當前時間步的in_batch壓棧
self.__hs.append(hs)
self.__in_batchs.append(in_batch)
#確保反向傳播開始時參數的梯度為空
self.__W.gradient = None
self.__Wh.gradient = None
self.__b.gradient = None
return self.activation(out)
反向傳播:
def backward(self, gradient):
grad = self.activation.grad(gradient)
W = self.__W.value
Wh = self.__Wh.value
pre_hs = self.__hs.pop()
in_batch = self.__in_batchs.pop()
grad_in_batch = grad @ W.T
grad_W = in_batch.T @ grad
grad_hs = grad @ Wh.T
grad_Wh = pre_hs.T @ grad
grad_b = grad.sum(axis=0)
#反向傳播計算
if self.__W.gradient is None:
#當前批次第一次
self.__W.gradient = grad_W
else:
#累積當前批次的所有梯度
self.__W.gradient = self.__W.gradient + grad_W
if self.__Wh.gradient is None:
self.__Wh.gradient = grad_Wh
else:
self.__Wh.gradient = self.__Wh.gradient + grad_Wh
if self.__b.gradient is None:
self.__b.gradient = grad_b
else:
self.__b.gradient = self.__b.gradient + grad_b
return grad_in_batch, grad_hs
GRU實現
文件: cutedl/rnn_layers.py, 類名: GRU
隱藏單初始化:
def set_parent(self, parent):
super().set_parent(parent)
out_units = self.out_units
in_units = self.in_units
#pdb.set_trace()
#重置門
self.__g_reset = GateUnit(out_units, in_units)
#更新門
self.__g_update = GateUnit(out_units, in_units)
#候選輸出門
self.__g_cddout = GateUnit(out_units, in_units, activation='tanh')
self.__g_reset.set_parent(self)
self.__g_update.set_parent(self)
self.__g_cddout.set_parent(self)
#重置門乘法單元
self.__u_gr = MultiplyUnit()
#輸出單元
self.__u_out = GRUOutUnit()
向前傳播:
def hiden_forward(self, in_batch, pre_hs, training):
gr = self.__g_reset.forward(in_batch, pre_hs, training)
gu = self.__g_update.forward(in_batch, pre_hs, training)
ugr = self.__u_gr.forward(gr, pre_hs, training)
cddo = self.__g_cddout.forward(in_batch, ugr, training)
hs = self.__u_out.forward(gu, pre_hs, cddo, training)
return hs
反向傳播:
def hiden_backward(self, gradient):
grad_gu, grad_pre_hs, grad_cddo = self.__u_out.backward(gradient)
#pdb.set_trace()
grad_in_batch, grad_ugr = self.__g_cddout.backward(grad_cddo)
#計算梯度的過程中需要累積上一層輸出的梯度
grad_gr, g_pre_hs = self.__u_gr.backward(grad_ugr)
grad_pre_hs = grad_pre_hs + g_pre_hs
g_in_batch, g_pre_hs = self.__g_update.backward(grad_gu)
grad_in_batch = grad_in_batch + g_in_batch
grad_pre_hs = grad_pre_hs + g_pre_hs
g_in_batch, g_pre_hs = self.__g_reset.backward(grad_gr)
grad_in_batch = grad_in_batch + g_in_batch
grad_pre_hs = grad_pre_hs + g_pre_hs
#pdb.set_trace()
return grad_in_batch, grad_pre_hs
LSTM實現
文件: cutedl/rnn_layers.py, 類名: LSTM
隱藏單元初始化:
def set_parent(self, layer):
super().set_parent(layer)
in_units = self.in_units
out_units = self.out_units
#輸入門
self.__g_in = GateUnit(out_units, in_units)
#遺忘門
self.__g_forget = GateUnit(out_units, in_units)
#輸出門
self.__g_out = GateUnit(out_units, in_units)
#記憶門
self.__g_memory = GateUnit(out_units, in_units, activation='tanh')
self.__g_in.set_parent(self)
self.__g_forget.set_parent(self)
self.__g_out.set_parent(self)
self.__g_memory.set_parent(self)
#記憶單元
self.__memory_unit =LSTMMemoryUnit()
#輸出單元
self.__out_unit = LSTMOutUnit()
向前傳播:
def hiden_forward(self, in_batch, hs, training):
g_in = self.__g_in.forward(in_batch, hs, training)
#pdb.set_trace()
g_forget = self.__g_forget.forward(in_batch, hs, training)
g_out = self.__g_out.forward(in_batch, hs, training)
g_memory = self.__g_memory.forward(in_batch, hs, training)
memory = self.__memory_unit.forward(g_forget, g_in, g_memory, training)
cur_hs = self.__out_unit.forward(g_out, memory, training)
return cur_hs
反向傳播:
def hiden_backward(self, gradient):
#pdb.set_trace()
grad_out, grad_memory = self.__out_unit.backward(gradient)
grad_forget, grad_in, grad_gm = self.__memory_unit.backward(grad_memory)
grad_in_batch, grad_hs = self.__g_memory.backward(grad_gm)
tmp1, tmp2 = self.__g_out.backward(grad_out)
grad_in_batch += tmp1
grad_hs += tmp2
tmp1, tmp2 = self.__g_forget.backward(grad_forget)
grad_in_batch += tmp1
grad_hs += tmp2
tmp1, tmp2 = self.__g_in.backward(grad_in)
grad_in_batch += tmp1
grad_hs += tmp2
return grad_in_batch, grad_hs
驗證
接下來, 驗證示例將會構建一個簡單的RNN模型, 使用該模型擬合一個正餘弦疊加函數:
#採樣函數
def sample_function(x):
y = 3*np.sin(2 * x * np.pi) + np.cos(x * np.pi) + np.random.uniform(-0.05,0.05,len(x))
return y
訓練數據集和測試數據集在這個函數的不同定義域區間內樣. 訓練數據集的採樣區間為[1, 200.01), 測試數據集的採樣區間為[200.02, 240.002). 模型任務是預測這個函數值的序列.
示例代碼在examples/rnn/fit_function.py文件中.
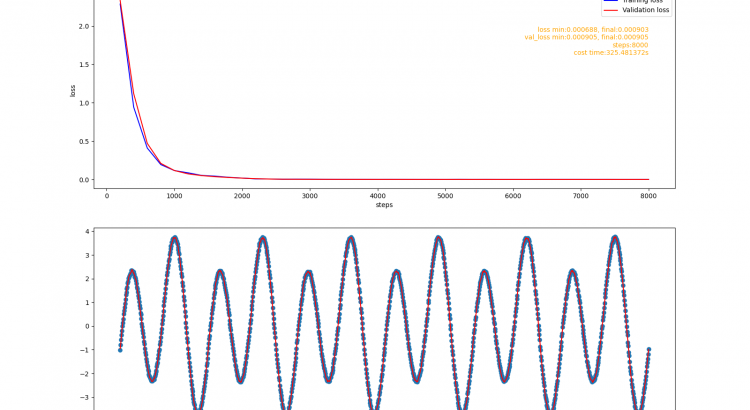
使用GRU構建的模型
def fit_gru():
model = Model([
rnn.GRU(32, 1),
nn.Filter(),
nn.Dense(32),
nn.Dense(1, activation='linear')
])
model.assemble()
fit('gru', model)
訓練報告:
使用LSTM構建的模型
def fit_lstm():
model = Model([
rnn.LSTM(32, 1),
nn.Filter(),
nn.Dense(2),
nn.Dense(1, activation='linear')
])
model.assemble()
fit('lstm', model)
訓練報告:
總結
這個階段,框架新增了RNN的兩個最常見的實現:GRU和LSTM, 相應地增加了它需要的激活函數. cute-dl已經具備了構建最基礎RNN模型的能力。通過驗證發現, GRU模型和LSTM模型在簡單任務上都表現出了很好的性能。會添加嵌入層,使框架能夠構建文本分類任務的模型,然後在imdb-review(電影評價)數據集上進行驗證.
本站聲明:網站內容來源於博客園,如有侵權,請聯繫我們,我們將及時處理
【其他文章推薦】
※網頁設計一頭霧水該從何著手呢? 台北網頁設計公司幫您輕鬆架站!
※網頁設計公司推薦不同的風格,搶佔消費者視覺第一線
※想知道購買電動車哪裡補助最多?台中電動車補助資訊懶人包彙整
※南投搬家公司費用,距離,噸數怎麼算?達人教你簡易估價知識!
※教你寫出一流的銷售文案?
※超省錢租車方案
※回頭車貨運收費標準