一 METRICS子系統組件
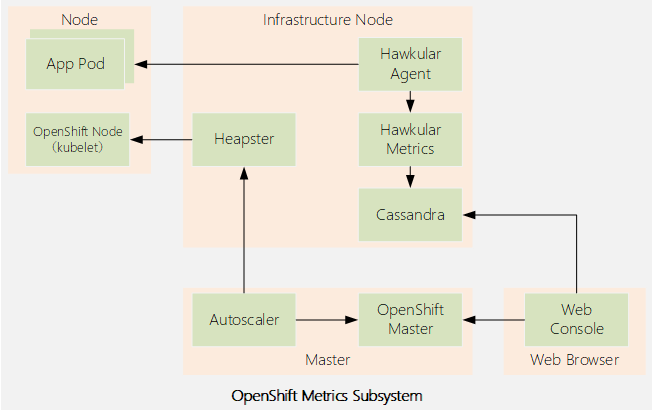
1.1 metric架構介紹
OpenShift metric子系統支持捕獲和長期存儲OpenShift集群的性能度量,收集節點以及節點中運行的所有容器的指標。
metric子系統被由以下開源項目的容器組件構成:
從Kubernetes集群中的所有節點收集指標,並將其轉發給存儲引擎進行長期存儲。OCP使用Hawkular作為Heapster的存儲引擎。
Heapster項目是由Kubernetes社區孵化的,目的是為第三方應用程序提供一種從Kubernetes集群捕獲性能數據的方法。
提供用於存儲和查詢時間序列數據的REST API。Hawkular Metrics組件是更大的Hawkular項目的一部分。Hawkular Metrics使用Cassandra作為其數據存儲。
Hawkular是作為RHQ項目(Red Hat JBoss Operations Network product)的繼承者創建的,是Red Hat CloudForms產品中間件管理功能的一個關鍵部分。
從應用程序收集自定義性能指標,並將其轉發到Hawkular Metrics進行存儲。應用程序為Hawkular agent提供度量標準。
Hawkular OpenShift Agent (HOSA)目前是一個技術預覽功能,默認情況下沒有安裝,Red Hat不支持技術預覽功能,也不建議將其用於生產。
將時間序列數據存儲在非關係分佈式數據庫中。
OpenShift Metrics子系統獨立於其他OpenShift組件工作。OpenShift只有三個部分需要metrics子系統來提供一些可選特性:
- web控制台調用Hawkular Metrics API來獲取數據,以呈現項目中pod的性能圖形。如果沒有部署度量子系統,則不显示圖表。
注意,這些調用是從用戶web瀏覽器發出的,而不是從OpenShift主節點發出的。
- oc adm top命令使用Heapster API來獲取關於集群中所有pod和節點的當前狀態的數據。
- Kubernetes的autoscaler控制器調用Heapster API來從部署中獲取關於所有pod當前狀態的數據,以便決定如何伸縮部署控制器。
OCP並不強制一定部署完整的度量子系統,如果已經有一個監視系統,並且希望使用它來管理OpenShift集群,那麼可以選擇只部署Heapster組件,並將度量的長期存儲委託給外部監視系統。
如果現有的監視系統只提供警報和健康功能,那麼監視系統可以使用Hawkular API捕獲指標來生成警報。
Heapster收集節點及其容器的指標,然後聚合pod、namespace和整個集群的指標。
Heapster為一個節點收集的指標包括:
working set:節點中運行的所有進程有效使用的內存,以bytes為單位度量。
CPU usage:節點中運行的所有進程使用的CPU數量,以millicores單位度量,十個millicores相當於一個CPU繁忙時間的1%。
Heapster還支持對內存中保留的指標進行簡單查詢,這些查詢允許獲取在特定時間範圍內收集和聚合的度量。
1.2 訪問Heapster和Hawkular
OpenShift用戶需要區分聲明的資源請求(和限制)與實際的資源使用情況。pod聲明的資源請求用於調度,聲明的資源請求從節點容量中減去,其差值是節點的剩餘可用容量。
節點的可用容量不反映在節點內運行的容器和其他應用程序使用的實際內存和CPU。
oc describe node命令,在OCP 3.9中,只显示與pods聲明的資源請求相關的信息。如果pod沒有聲明任何資源請求,則不會考慮pod的實際資源使用情況,節點的可用容量可能看起來比實際容量大。
web控制台显示的信息與oc describe node命令相同,還可以显示Hawkular Metrics的實際資源使用情況。但是,OCP 3.9的web控制台只显示pod和項目的指標,web控制台不显示節點指標。
要獲得節點的實際資源使用情況,並確定節點是否接近其全部硬件或虛擬容量,系統管理員需要使用oc adm top命令。如果需要更詳細的信息,系統管理員可以使用標準的Linux命令,比如vmstat和ps。
OpenShift不向集群外部公開Heapster組件。外部應用程序需要訪問Heapster必須使用OpenShift master API代理。master API代理確保對內部組件API的訪問遵從OpenShift集群身份驗證和訪問控制策略。
將Hawkular暴露給外部訪問涉及到一些安全方面的考慮。如果系統管理員認為使用Heapster和Hawkular api過於複雜,那麼Origin和Kubernetes開源項目的上游社區還提供了與Nagios和Zabbix等流行的開源監控工具的集成,或者當前最火熱的Prometheus。
1.3 Metrics subsystem大小
OpenShift度量子系統的每個組件都使用自己的dc進行部署,並且獨立於其他組件進行伸縮。它們可以計劃在OpenShift集群的任何地方運行,但是建議為生產環境中的metrics子系統pod特定保留一些node0。
Cassandra和Hawkular是Java應用程序。Hawkular運行在JBoss EAP 7應用服務器中。Hawkular和Cassandra都利用了大規模的優勢,默認值是為中小型OpenShift集群設置的大小。測試環境可能需要更改默認值,以減少內存和CPU資源。
Heapster和Hawkular部署使用標準的OpenShift工具部署size、比例和調度。少量Heapster和Hawkular pods可以管理數百個OpenShift節點和數千個項目的指標。
可以使用oc命令配置Heapster和Hawkular部署。例如增加每個pod請求的副本數量或資源數量,但是推薦的配置參數的方法是修改為安裝Metrics的Ansible劇本中的變量。
Cassandra不能使用標準oc命令進行伸縮和配置,因為Cassandra(大多數數據庫都是這樣)不是無狀態雲應用程序。Cassandra有嚴格的存儲要求,每個Cassandra pod都有不同的部署配置。必須使用Metrics安裝playbook來伸縮和配置Cassandra部署。
1.4 CASSANDRA配置持久存儲
Cassandra可以部署為單個pod,使用一個持久卷。但至少需要三個Cassandra pod才能為度量子系統實現高可用性(HA)。每個pod都需要一個獨佔卷:Cassandra使用“無共享”存儲架構。
儘管Cassandra可以使用enptyDir存儲進行部署,但這意味着存在永久數據丟失的風險。通常生產環境不推薦使用臨時存儲(即emptyDir卷類型)。
每個Cassandra卷使用的存儲量不僅取決於預期的集群大小(節點和pod的數量),還取決於度量的時間序列的粒度和持續時間。
Metrics安裝劇本支持使用靜態供應的持久卷或動態卷。無論選擇哪種方法,playbook都基於前綴創建持久卷聲明,前綴後面附加一個序列號。對於靜態供應的持久卷,請確保使用相同的命名約定。
二 METRICS子系統
2.1 部署metrics子系統
OpenShift Metrics子系統由Ansible playbook部署,可以選擇使用基本playbook或單獨用於Metrics的playbook進行部署。
大多數Metrics子系統配置是使用用於高級安裝方法的Inventory文件中的Ansible變量執行的。儘管可以使用-e選項覆蓋或自定義某些變量的值,更建議在Inventory中定義metrics變量。如果需要更改度量Metrics配置,可更新Inventory中的變量並重新運行安裝劇本。
metrics子系統在許多生產環境中不需要認定配置,可直接通過運行metrics安裝劇本使用默認設置安裝。
示例:Ansible結合主配置文件和Metrics子系統playbook安裝。
Ansible主配置文件如下:
1 [defaults]
2 remote_user = student
3 inventory = ./inventory
4 log_path = ./ansible.log
5 [privilege_escalation]
6 become = yes
7 become_user = root
8 become_method = sudo
9 Metrics子系統劇本:
10 # ansible-playbook \
11 /usr/share/ansible/openshift-ansible/playbooks
/openshift-metrics/config.yml \
-e openshift_metrics_install_metrics=True
提示:OpenShift metrics劇本由openshift-ansibl -playbooks包提供,該包是作為atom-openshift-utils包的依賴項安裝的。
openshift_metrics_install_metrics Ansible變量配置劇本用來部署metrics子系統,playbook為metrics子系統創建dc、service和其他支撐metrics的Kubernetes資源,還可以在用於部署集群的Inventory文件中定義該變量。
metrics子系統安裝playbook會在openshift-infra項目中創建所需Kubernetes資源。安裝playbook不配置任何節點選擇器來限制pod所運行的node。
2.2 卸載metrics子系統
卸載OpenShift metrics子系統的一種方法是手動刪除OpenShift-infra項目中的所有Kubernetes資源。通常需要多個oc命令,且容易出錯,因為其他OpenShift子系統也被部署到這個項目。
卸載metrics子系統的推薦方法是運行安裝劇本,但是將openshift_metrics_install_metrics Ansible變量設置為False,如下面的示例所示,-e選項覆蓋庫存文件中定義的值。
1 # ansible-playbook \
2 /usr/share/ansible/openshift-ansible/playbooks/openshift-metrics/config.yml \
3 -e openshift_metrics_install_metrics=False
2.3 驗證metrics子系統
OpenShift metrics子系統playbook完成后,應該創建所有Cassandra、Hawkular和Heapster pod,並可能需要一些時間進行初始化。可能由於Cassandra pod初始化時間過長,會重新啟動Hawkular和Heapster pod。
除非另外配置,否則安裝程序劇本應該為每個組件創建一個dc,其中包含一個pod,並且openshift-infra項目的oc get pod能显示相應pod。
2.4 部署metrics子系統常見錯誤
造成部署錯誤的常見原因通常有:
- image缺失;
- metrics所需資源過高,節點無法滿足;
- Cassandra pod所需的持久卷無法滿足。
2.5 其他配置
在所有pod準備好並運行之後,需要執行一個特定配置以便於和web對接。如果跳過此步驟,OpenShift web控制台將無法显示項目的metrics圖形,儘管底層metrics子系統正在正常工作。
OpenShift web控制台是一個JavaScript應用程序,它直接訪問Hawkular API,而不需要經過OpenShift master service。
但由於內部使用TLS訪問API,默認情況下,TLS證書不是由受信任的認證機構簽署的。因此web瀏覽器拒絕連接到Hawkular API endpoint。
在OpenShift安裝之後,web控制台本身也會出現類似證書不信任的問題。與metrics同樣的方式解決,配置瀏覽器接受TLS證書。為此,在web瀏覽器中打開Hawkular API歡迎頁面,並接受不受信任的TLS證書。
https://hawkular-metrics.<master-wildcard-domain>
主通配符域DNS後綴應該與OpenShift主服務中配置的後綴相同,並用作新路由的默認域。
playbook從Ansible hosts文件中獲取主通配符域值,由openshift_master_default_subdomain變量定義。如果更改了OpenShift master service配置,則它們將不匹配。在本例中,為metrics劇本中的openshift_metrics_hawkular_hostname變量提供新值。2.6
2.6 metrics涉及變量
OCP安裝和配置文檔提供了metrics安裝劇本使用的所有可能變量的列表,它們控制着各種配置參數。常見有:
每個組件的pod比例:
- openshift_metrics_cassandra_replicas
- openshift_metrics_hawkular_replicas
每個組件對pod的資源請求和限制:
- openshift_metrics_cassandra_requests_memory
- openshift_metrics_cassandra_limits_memory
- openshift_metrics_cassandra_requests_cpu
- openshift_metrics_cassandra_limits_cpu
對於Hawkular和Heapster,有類似配置:
- openshift_metrics_hawkular_requests_memory
- openshift_metrics_heapster_requests_memory
用於duration和resolution參數:
- openshift_metrics_duration
- openshift_metrics_resolution
Cassandra pods的持久卷聲明屬性:
- openshift_metrics_cassandra_storage_type
- openshift_metrics_cassandra_pvc_prefix
- openshift_metrics_cassandra_pvc_size
用於pull metrics子系統容器image的倉庫:
- openshift_metrics_image_prefix
- openshift_metrics_image_version
其他配置參考:
- openshift_metrics_heapster_standalone
- openshift_metrics_hawkular_hostname
示例1:使用自定義配置安裝metrics子系統,用於覆蓋Inventory中定義的Cassandra配置。
1 [OSEv3:vars]
2 ...output omitted...
3 openshift_metrics_cassandra_replicas=2
4 openshift_metrics_cassandra_requests_memory=2Gi
5 openshift_metrics_cassandra_pvc_size=50Gi
示例2:使用自定義配置,用於覆蓋Cassandra定義的屬性。
1 # ansible-playbook \
2 /usr/share/ansible/openshift-ansible/playbooks/openshift-metrics/config.yml \
3 -e openshift_metrics_cassandra_replicas=3 \
4 -e openshift_metrics_cassandra_requests_memory=4Gi \
5 -e openshift_metrics_cassandra_pvc_size=25Gi
提示:大多數配置參數都可以使用OpenShift oc命令進行更改,但是推薦的方法是使用更新Inventory中變量值運行metrics安裝劇本進行修改。
三 安裝metrics子系統
3.1 前置準備
準備完整的OpenShift集群,參考《003.OpenShift網絡》2.1。
3.2 本練習準備
1 [student@workstation ~]$ lab install-metrics setup
3.3 驗證image
1 [student@workstation ~]$ docker-registry-cli registry.lab.example.com \
2 search metrics-cassandra ssl
3 [student@workstation ~]$ docker-registry-cli registry.lab.example.com \
4 search ose-recycler ssl
3.4 驗證NFS
1 [root@services ~]# ll -aZ /exports/metrics/
2 drwxrwxrwx. nfsnobody nfsnobody unconfined_u:object_r:default_t:s0 .
3 drwxr-xr-x. root root unconfined_u:object_r:default_t:s0 ..
4 [root@services ~]# cat /etc/exports.d/openshift-ansible.exports
3.5 創建PV
1 [student@workstation ~]$ cat /home/student/DO280/labs/install-metrics/metrics-pv.yml
2 apiVersion: v1
3 kind: PersistentVolume
4 metadata:
5 name: metrics
6 spec:
7 capacity:
8 storage: 5Gi #定義capacity.storage容量為5G
9 accessModes:
10 - ReadWriteOnce #定義訪問模式
11 nfs:
12 path: /exports/metrics #定義nfs.path
13 server: services.lab.example.com #定義nfs.services
14 persistentVolumeReclaimPolicy: Recycl #定義回收策略
1 [student@workstation ~]$ oc login -u admin -p redhat https://master.lab.example.com
2 [student@workstation ~]$ oc create -f /home/student/DO280/labs/install-metrics/metrics-pv.yml
3 [student@workstation ~]$ oc get pv
4 NAME CAPACITY ACCESS MODES RECLAIM POLICY STATUS CLAIM STORAGECLASS REASON AGE
5 metrics Gi RWO Recycle Available 14s
3.6 規劃安裝變量
openshift_metrics_image_prefix:指向服務VM上的私有倉庫,並添加openshift3/ose-作為映像名稱前綴。
openshift_metrics_image_version:要使用的容器image標記,私有倉庫為image添加一個v3.9標記。
openshift_metrics_heapster_requests_memory:本環境配置300mb內存。
openshift_metrics_hawkular_requests_memory:本環境配置750mb內存。
openshift_metrics_cassandra_requests_memory:本環境配置750mb內存。
openshift_metrics_cassandra_storage_type:使用pv選擇一個持久卷作為存儲類型。
openshift_metrics_cassandra_pvc_size:本環境配置5gib容量。
openshift_metrics_cassandra_pvc_prefix:使用metrics作為pvc名稱的前綴.
提示:生產環境中建議根據實際規劃進行配置,可適當調大配置規格。
3.7 配置安裝變量
1 [student@workstation ~]$ cd /home/student/DO280/labs/install-metrics
2 [student@workstation install-metrics]$ cat metrics-vars.txt
3 # Metrics Variables
4 # Append the variables to the [OSEv3:vars] group
5 openshift_metrics_install_metrics=True
6 openshift_metrics_image_prefix=registry.lab.example.com/openshift3/ose-
7 openshift_metrics_image_version=v3.9
8 openshift_metrics_heapster_requests_memory=300M
9 openshift_metrics_hawkular_requests_memory=750M
10 openshift_metrics_cassandra_requests_memory=750M
11 openshift_metrics_cassandra_storage_type=pv
12 openshift_metrics_cassandra_pvc_size=5Gi
13 openshift_metrics_cassandra_pvc_prefix=metrics
14 [student@workstation install-metrics]$ cat metrics-vars.txt >> inventory
15 [student@workstation install-metrics]$ lab install-metrics grade #本環境使用腳本判斷配置
3.8 執行安裝
1 [student@workstation install-metrics]$ ansible-playbook /usr/share/ansible/openshift-ansible/playbooks/openshift-metrics/config.yml
3.9 驗證安裝
1 [student@workstation install-metrics]$ oc get pvc -n openshift-infra #驗證持久卷是否成功掛載
2 NAME STATUS VOLUME CAPACITY ACCESS MODES STORAGECLASS AGE
3 metrics-1 Bound metrics 5Gi RWO 5m
4 [student@workstation install-metrics]$ oc get pod -n openshift-infra #驗證metric相關pod
5 NAME READY STATUS RESTARTS AGE
6 hawkular-cassandra-1-6k7fr 1/1 Running 0 5m
7 hawkular-metrics-z9v85 1/1 Running 0 5m
8 heapster-mbdcl 1/1 Running 0 5m
9 [student@workstation install-metrics]$ oc get route -n openshift-infra #查看metric route地址
10 NAME HOST/PORT PATH SERVICES PORT TERMINATION WILDCARD
11 hawkular-metrics hawkular-metrics.apps.lab.example.com hawkular-metrics <all> reencrypt
12 None
瀏覽器訪問:
https://hawkular-metrics.apps.lab.example.com
提示:瀏覽器信任SSL證書。
3.10 部署測試應用
1 [student@workstation ~]$ oc login -u developer -p redhat \
2 https://master.lab.example.com #登錄OpenShift
3 [student@workstation ~]$ oc new-project load #創建project
4 [student@workstation ~]$ oc new-app --name=hello \
5 --docker-image=registry.lab.example.com/openshift/hello-openshift #部署應用
6 [student@workstation ~]$ oc scale --replicas=9 dc/hello #擴展應用
7 [student@workstation ~]$ oc get pod -o wide #查看pod
8 NAME READY STATUS RESTARTS AGE IP NODE
9 hello-1-4nvfd 1/1 Running 0 1m 10.129.0.40 node2.lab.example.com
10 hello-1-c9f8t 1/1 Running 0 1m 10.128.0.22 node1.lab.example.com
11 hello-1-dfczg 1/1 Running 0 1m 10.128.0.23 node1.lab.example.com
12 hello-1-dvdx2 1/1 Running 0 1m 10.129.0.36 node2.lab.example.com
13 hello-1-f6rsl 1/1 Running 0 1m 10.128.0.20 node1.lab.example.com
14 hello-1-m2hb4 1/1 Running 0 1m 10.129.0.39 node2.lab.example.com
15 hello-1-r64z9 1/1 Running 0 1m 10.128.0.21 node1.lab.example.com
16 hello-1-tf4l5 1/1 Running 0 1m 10.129.0.37 node2.lab.example.com
17 hello-1-wl6zx 1/1 Running 0 1m 10.129.0.38 node2.lab.example.com
18 [student@workstation ~]$ oc expose svc hello
3.11 壓力測試
1 [student@workstation ~]$ sudo yum -y install httpd-tools
2 [student@workstation ~]$ ab -n 300000 -c 20 http://hello-load.apps.lab.example.com/
3.12 查看資源使用情況
1 [student@workstation ~]$ oc login -u admin -p redhat
2 [student@workstation ~]$ oc adm top node \
3 --heapster-namespace=openshift-infra \
4 --heapster-scheme=https
5 NAME CPU(cores) CPU% MEMORY(bytes) MEMORY%
6 master.lab.example.com 273m 13% 1271Mi 73%
7 node1.lab.example.com 1685m 84% 3130Mi 40%
8 node2.lab.example.com 1037m 51% 477Mi 6%
提示:保持3.11的壓測程序,重開終端進行查看。
3.13 獲取指標
1 [student@workstation ~]$ cat ~/DO280/labs/install-metrics/node-metrics.sh #使用此腳本獲取指標
1 [student@workstation ~]$ ./DO280/labs/install-metrics/node-metrics.sh
瀏覽器訪問:https://master.lab.example.com
查看相關性能監控。
本站聲明:網站內容來源於博客園,如有侵權,請聯繫我們,我們將及時處理
【其他文章推薦】
※網頁設計一頭霧水該從何著手呢? 台北網頁設計公司幫您輕鬆架站!
※網頁設計公司推薦不同的風格,搶佔消費者視覺第一線
※Google地圖已可更新顯示潭子電動車充電站設置地點!!
※廣告預算用在刀口上,台北網頁設計公司幫您達到更多曝光效益
※別再煩惱如何寫文案,掌握八大原則!
※網頁設計最專業,超強功能平台可客製化